
Page 11 - Bulletin mars 2021
P. 11
les élèves de certaines STS. Il s’agit d’une activité
de travail pratique au cours de laquelle l’étudiant
pourra endosser successivement le rôle d’ingé-
nieur préparateur du M-Rex puis celui d’entraîneur
d’une équipe de rugby. Pour mener à bien ce pro-
jet nous sommes retournés à Marcoussis, où nous
avons procédé à des mesures sur le site pour fina-
liser un modèle multi-physique du système M-Rex
(Figure 1).
Dans un premier temps, en se basant sur des me-
sures et des dimensions fournies par Thalès,
l’équipe a développé un modèle numérique avec
Solidworks.
Dans un second temps, nous avons importé le fi-
chier CAD dans SimscapeMultibody, ajouté les
autres domaines comme la motorisation, l’asser-
vissement des 6 axes ou vérins, une fonction MAT-
LAB pour les calculs cinématiques et instrumenté
le modèle pour permettre le bon comportement
du système et son analyse.
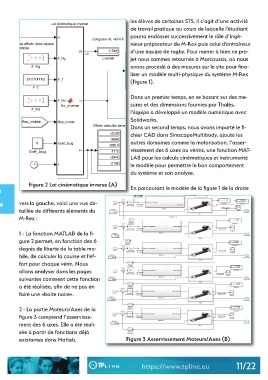
Figure 2 Loi cinématique inverse (A)
En parcourant le modèle de la figure 1 de la droite
E vers la gauche, voici une vue dé-
taillée de différents éléments du
M-Rex :
1 - La fonction MATLAB de la fi-
gure 2 permet, en fonction des 6
degrés de liberté de la table mo-
bile, de calculer la course et l’ef-
fort pour chaque vérin. Nous
allons analyser dans les pages
suivantes comment cette fonction
a été réalisée, afin de ne pas en
faire une «boite noire».
2 - La partie Moteurs/Axes de la
figure 3 comprend l’asservisse-
ment des 6 axes. Elle a été réali-
sée à partir de fonctions déjà
existantes dans Matlab. Figure 3 Asservissement Moteurs/Axes (B)
11/22